Chapter Four: Vector Loops
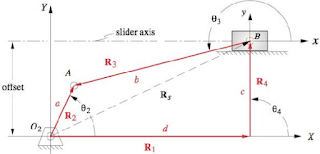
Chapter Four - Vector Loops Learning to Love Loops! Have you ever woken up in the morning and wanted to draw a vector loop for a four-bar linkage? I haven't either, but we're going to do one today. Sometimes it is necessary to draw a vector loop for a four-bar linkage. Such a case is with a crank slider, where the rocker is not a physical link and must be imagined. Slider cranks are popular inversions of the four-bar and have real world applications with things such as pistons. This image depicts a as the crank, b as the coupler, c as the rocker, and d as the ground. The x and y components of this crank slider can be broken up into two separate equations, as follows: ...
